
IRB2600的改进D-H法
建立IRB2600的改进D-H模型:
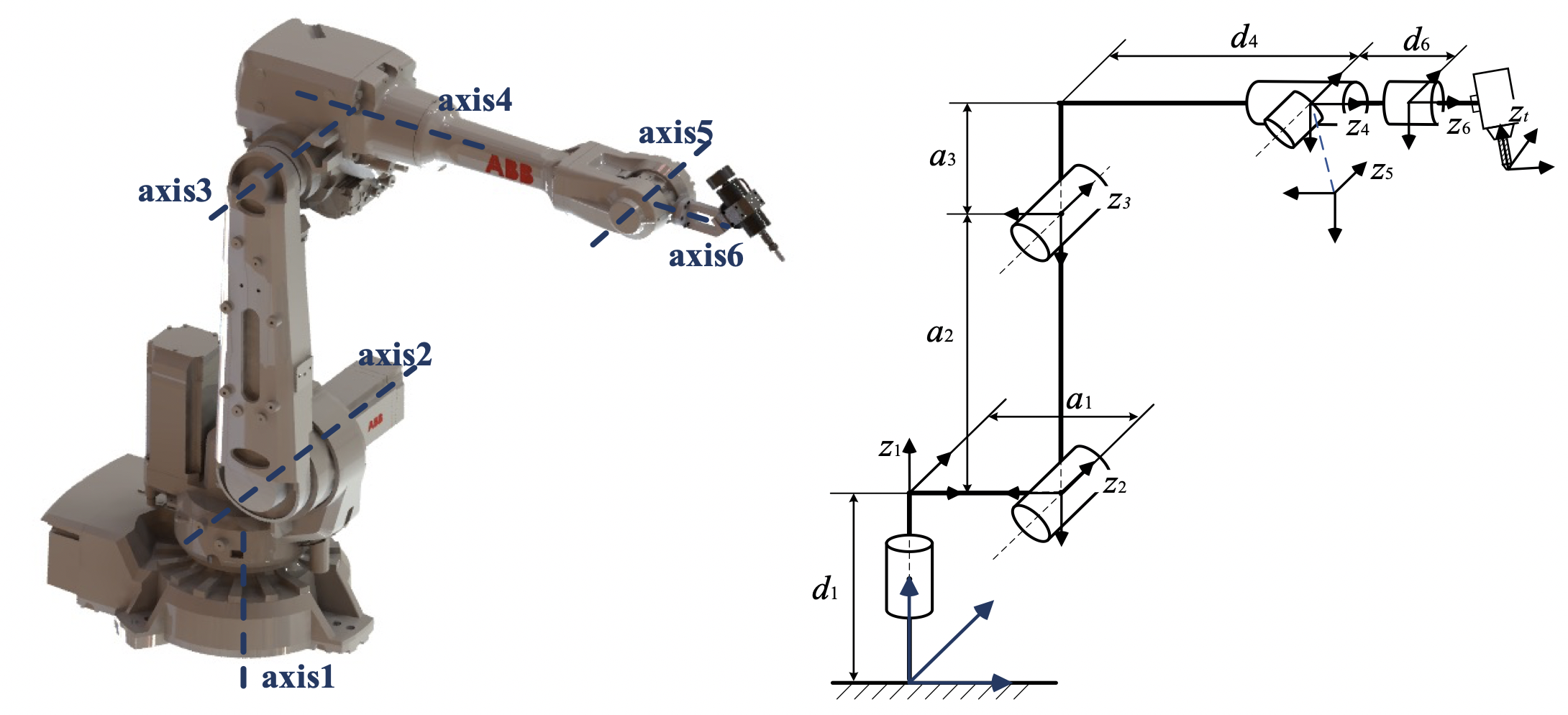
IRB2600的改进D-H参数表:
|
轴号 |
|
|
|
|
| 1 |
|
|
|
|
| 2 |
|
|
|
|
| 3 |
|
|
|
|
| 4 |
|
|
|
|
| 5 |
|
|
|
|
| 6 |
|
|
|
|
则机器人的运动学可以公式为:
其中代表后置连杆坐标系下的齐次变换矩阵,与Modified D-H参数对应:
IRB2600的逆运动学解析解推算
推算theta_1:
利用关系式:对
进行推算,通过对比矩阵元素之间关系,可按照如下过程求解
化简得到:
对于的计算,将会产生两个解。
推算theta_2和theta_3:
和
可以由一个等式关系确定:
,首先为确定
关于
的关系式,通过矩阵中如下元素的等式关系:
化简得:
为化简需要,令和
,通过上式联立起来可以消除
和
,从而得到:
其中:
观察发现,式中只有和
是未知量,由此可建立
关于的
关系表达式,即
的解析解:
对于的计算,亦会产生两个解。
以上求出了和
,将
和
作为未知数,求出:
其中:
结合已算出的和
,可以计算出关节角
。
推算theta_5、theta_4和theta_6:
经过几次推算尝试,观察矩阵元素的特征(矩阵中元素表达式只含
且简单,
矩阵中只含
且已求得),因此确定关系式:
为推导
的等式关系,根据矩阵中元素等式关系:
可以直接求得:
用该解析解计算,会得到两个解。
为求得,可建立如下关系式:
化简得:
如此可以确定解。
利用矩阵元素对应相等关系:
化简为:
由式可求得,其解与
唯一对应。
矢量积法求解雅可比
雅可比矩阵可以看成是关节空间的速度矢量
向笛卡尔空间的速度矢量
的线性映射。雅可比矩阵
依赖于机器人的构形,是一个依赖于
的线性变换矩阵,雅可比矩阵
不一定是方阵,它可能是长矩阵,也可能是高矩阵,
的行数等于机器人在笛卡尔空间中的自由度数,比如平面操作臂的雅可比矩阵有3行,6关节的空间操作臂的雅可比矩阵是6行,对于关节的机器人,
其雅可比矩阵
是
的矩阵,其中前3行表示对末端执行器线速度
的传递比,后3行表示对末端执行器角速度
的传递比。
另一方面,每一列代表相应的关节速度对末端执行器线速度和角速度的传递比。
公式中, 和
分别表示关节
的单位关节速度引起的末端执行器的线速度和角速度。
下面基于矢量积法,不求导而直接构造出 和
。
Whitney于1972年提出雅可比矩阵的矢量积构造方法。线速度和角速度分别使用和
来表示。而
和
与关节速度
有关。
- 对于移动关节
,在末端执行器上产生与
相同的线速度
。
- 对于旋转关节
为:
同时在末端执行器上产生的线速度为矢量积,即:
因此,雅可比矩阵的第列为:
其中,是坐标系{
} 的
轴单位矢量(在基座坐标系{
}中表示)。
公式中,表示末端执行器坐标原点想对于坐标系{
}的位置矢量在基坐标系{
}中的表示,即:
有时,要求沿着工具坐标系的某轴进行控制,因此需要将线速度和角速度在工具坐标系{}中进行表示。为此,需要在
和
前乘以
的旋转矩阵
,即:
公式中,表示在工具坐标系{
}中的雅可比矩阵。